
A study of bicycle self-stability
 The bicycle has been around for centuries. From the first, the Draisienne, in 1817, to Starley’s Rover in 1885, the first recognizably modern bicycle, to the American bike boom of the 1970s, bicycles have been a part of everyday life. Despite its prevalence in society, how it works has remained a mystery. Mathematician Emmanuel Carvallo was the first analysis of bicycle self-stability, published in 1897. Since then, dozens of mathematicians and physicists have tackled the problem. I will present some of these analyses, as well as a groundbreaking experiment conducted recently.A bicycle is technically defined as a “three-dimensional mechanism made up of four rigid objects (the rear frame with rider body, the handlebar assembly, and two rolling wheels) connected by three hinges.”(Kooijman, Meijaard and Papadopoulos) One of the mysteries of a bicycle is how it achieves self-stability – correcting its own falls to remain upright. This behavior is evident when riding a bicycle with no hands, or even steering a bicycle and feeling it try to self-correct. In fact, in experimenting with bicycle self-stability, scientists generally test a bicycle in free-motion without a rider as well as riding the bicycle with no hands. This experimentation has led to surprisingly accurate mathematical conclusions. Since the earliest analyses of bicycle stability, second-order differential equations have been used to accurately describe leaning and steering. But how are they related, and how do they apply to self-correction? Why does leaning affect steering, and why does steering affect leaning? The two most common explanations are the gyroscopic effect and angular momentum of the front wheel, and the caster effect of an offset steering axis.The gyroscopic torque theory was explained in depth by Klein and Sommerfield as early as 1910. As a lean is introduced to a bicycle, a reactive torque is applied to the steering column by the wheel. Let’s say that a right lean is introduced to a bicycle. The right lean also is introduced to the steering axis, and the reactive torque of the wheel turns the handle bar to the right. Turning the handlebars to the right, the bicycle begins to turn right and a centrifugal force pushes left, lifting the bicycle upright. Some have thought that the gyroscopic force of the wheel keeps the wheel upright, like a simple gyroscope, but this is not the case. Rather, the reactive torque of the wheel turns the handlebars, and the turning of the handlebars creates a physical turn of the bike, which produces a centrifugal force in the direction opposite to the turn and pulls the bike upright, out of the lean, and straightens the steering direction. Because of the mass of the wheel compared to the bicycle and its rider, this force in negligible when the bicycle is ridden, because the wheel doesn’t exert a strong force compared to the force the rider is actually using to turn the bike. Comparing impulse and potential energy of the wheel vs. that of the rider also shows that this force is seemingly rendered null. But its importance is much more noticeable on a non-manned bicycle, simply given a push and left to self-correct itself. But force is a force, as unnoticeable as it may be. As summarized by Klein and Sommerfield, “The gyroscopic action, in spite of its smallness, is necessary for self-stability.”
The bicycle has been around for centuries. From the first, the Draisienne, in 1817, to Starley’s Rover in 1885, the first recognizably modern bicycle, to the American bike boom of the 1970s, bicycles have been a part of everyday life. Despite its prevalence in society, how it works has remained a mystery. Mathematician Emmanuel Carvallo was the first analysis of bicycle self-stability, published in 1897. Since then, dozens of mathematicians and physicists have tackled the problem. I will present some of these analyses, as well as a groundbreaking experiment conducted recently.A bicycle is technically defined as a “three-dimensional mechanism made up of four rigid objects (the rear frame with rider body, the handlebar assembly, and two rolling wheels) connected by three hinges.”(Kooijman, Meijaard and Papadopoulos) One of the mysteries of a bicycle is how it achieves self-stability – correcting its own falls to remain upright. This behavior is evident when riding a bicycle with no hands, or even steering a bicycle and feeling it try to self-correct. In fact, in experimenting with bicycle self-stability, scientists generally test a bicycle in free-motion without a rider as well as riding the bicycle with no hands. This experimentation has led to surprisingly accurate mathematical conclusions. Since the earliest analyses of bicycle stability, second-order differential equations have been used to accurately describe leaning and steering. But how are they related, and how do they apply to self-correction? Why does leaning affect steering, and why does steering affect leaning? The two most common explanations are the gyroscopic effect and angular momentum of the front wheel, and the caster effect of an offset steering axis.The gyroscopic torque theory was explained in depth by Klein and Sommerfield as early as 1910. As a lean is introduced to a bicycle, a reactive torque is applied to the steering column by the wheel. Let’s say that a right lean is introduced to a bicycle. The right lean also is introduced to the steering axis, and the reactive torque of the wheel turns the handle bar to the right. Turning the handlebars to the right, the bicycle begins to turn right and a centrifugal force pushes left, lifting the bicycle upright. Some have thought that the gyroscopic force of the wheel keeps the wheel upright, like a simple gyroscope, but this is not the case. Rather, the reactive torque of the wheel turns the handlebars, and the turning of the handlebars creates a physical turn of the bike, which produces a centrifugal force in the direction opposite to the turn and pulls the bike upright, out of the lean, and straightens the steering direction. Because of the mass of the wheel compared to the bicycle and its rider, this force in negligible when the bicycle is ridden, because the wheel doesn’t exert a strong force compared to the force the rider is actually using to turn the bike. Comparing impulse and potential energy of the wheel vs. that of the rider also shows that this force is seemingly rendered null. But its importance is much more noticeable on a non-manned bicycle, simply given a push and left to self-correct itself. But force is a force, as unnoticeable as it may be. As summarized by Klein and Sommerfield, “The gyroscopic action, in spite of its smallness, is necessary for self-stability.”
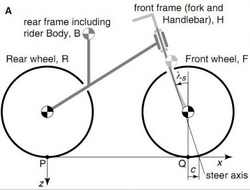 As experimentation continued, one scientist decided to take the gyroscopic force out of the equation by adding a counter-rotating disk to the front wheel. He was Dr. D. E. H. Jones, and he made the startling discovery that a bicycle with this counter-rotating disk is still self-stable, although he found it difficult to ride without hands. After further experimentation, he nailed down another factor of self-stability – the offset of the steering axis with the wheel’s point of contact with the ground. This offset is called the caster effect, the caster trail being the distance that the wheel’s point of contact trails behind the steering axis. It is somewhat like the wheel of a shopping cart, with the wheel trailing behind the steering axis. As the bicycle is propelled forward, the wheel is “dragged” into alignment with the direction of travel, as long as the bicycle is moving forward at a sufficient speed to align the wheel before the bicycle falls over. Jones also explained the link between lean and steer with his caster effect. If a bicycle is leaned to the right and a downward force is applied to the bike, the steering axis will fall and a rightward turn will be introduced to the steering column. Again, this causes the bicycle to steer into the fall and right itself with a gyroscopic force.Combining Jones’ work with Klein and Sommerfield’s application of gyroscopics, a universally accepted explanation was reached – that steering is stable because of the caster effect, and leaning is stable because of a combination of the gyroscopic reactive torque and the caster effect. This theory stood for about forty years, until scientists at Cornell University designed a self-stable bicycle that did not fit these two criteria.
As experimentation continued, one scientist decided to take the gyroscopic force out of the equation by adding a counter-rotating disk to the front wheel. He was Dr. D. E. H. Jones, and he made the startling discovery that a bicycle with this counter-rotating disk is still self-stable, although he found it difficult to ride without hands. After further experimentation, he nailed down another factor of self-stability – the offset of the steering axis with the wheel’s point of contact with the ground. This offset is called the caster effect, the caster trail being the distance that the wheel’s point of contact trails behind the steering axis. It is somewhat like the wheel of a shopping cart, with the wheel trailing behind the steering axis. As the bicycle is propelled forward, the wheel is “dragged” into alignment with the direction of travel, as long as the bicycle is moving forward at a sufficient speed to align the wheel before the bicycle falls over. Jones also explained the link between lean and steer with his caster effect. If a bicycle is leaned to the right and a downward force is applied to the bike, the steering axis will fall and a rightward turn will be introduced to the steering column. Again, this causes the bicycle to steer into the fall and right itself with a gyroscopic force.Combining Jones’ work with Klein and Sommerfield’s application of gyroscopics, a universally accepted explanation was reached – that steering is stable because of the caster effect, and leaning is stable because of a combination of the gyroscopic reactive torque and the caster effect. This theory stood for about forty years, until scientists at Cornell University designed a self-stable bicycle that did not fit these two criteria. First, to eliminate the gyroscopic force of the wheels, a second wheel of equal size was added adjacent to each wheel. Now some may think that this doubles the gyroscopic force and would keep the bike even more upright, however it is important to remember that it isn’t the gyroscopic force that directly affects self-stability, but rather the gyroscopic force of the front wheel causes a reactive torque that turns the handlebar if a lateral lean is applied to the bicycle. So adding the second wheel negates the gyroscopic effect, so that introducing a lean to the bicycle does not turn the wheel because of a reactive torque. Then, to eliminate the caster effect, the contact point of the wheel was placed slightly in front of the steering axis (in the final product, a mere 4 mm). With the contact point ahead of the steering axis, the wheel was not dragged into alignment with the direction of travel, thus negating the caster effect on this experimental bicycle.These changes, in addition to careful mass placement, decreased the number of manageable parameters to eight – only eight variables to affect the bicycle self-stability. This low number of parameters made it relatively easy to find which variable most affects self-stability of a bicycle. Countless computer generations were first ran, with the caster trail set to 0, no friction applied, and no gyroscopic action of the wheels. The results of the simulation showed that self-stability can be achieved at a speed of 2.3 m/s.
First, to eliminate the gyroscopic force of the wheels, a second wheel of equal size was added adjacent to each wheel. Now some may think that this doubles the gyroscopic force and would keep the bike even more upright, however it is important to remember that it isn’t the gyroscopic force that directly affects self-stability, but rather the gyroscopic force of the front wheel causes a reactive torque that turns the handlebar if a lateral lean is applied to the bicycle. So adding the second wheel negates the gyroscopic effect, so that introducing a lean to the bicycle does not turn the wheel because of a reactive torque. Then, to eliminate the caster effect, the contact point of the wheel was placed slightly in front of the steering axis (in the final product, a mere 4 mm). With the contact point ahead of the steering axis, the wheel was not dragged into alignment with the direction of travel, thus negating the caster effect on this experimental bicycle.These changes, in addition to careful mass placement, decreased the number of manageable parameters to eight – only eight variables to affect the bicycle self-stability. This low number of parameters made it relatively easy to find which variable most affects self-stability of a bicycle. Countless computer generations were first ran, with the caster trail set to 0, no friction applied, and no gyroscopic action of the wheels. The results of the simulation showed that self-stability can be achieved at a speed of 2.3 m/s. With this simulation effectively proving that the caster effect and gyroscopic torque were not the only factors in self-stabilization, the Cornell team built a simple but carefully designed “Two Mass Skate” bicycle, or TMS bicycle. They called it the Two Mass Skate bicycle because a critical design element was the placement of the two masses attached to the bicycle, one attached to the rear frame and one on the steering column. As I will later describe, the placement of these two masses was critical in achieving self-stability. The Skate term comes from their desire to eliminate gyroscopic effects, a skate having no gyroscopic torque. The term is also related to the caster effect, with the ground point of contact ahead of the steering axis, similar to a skate. The design turned out to be much harder than the simulated bicycle, because the simulated bicycle was designed with point masses, but of course an actual bike deals with distributed mass throughout the frame. The wheels were also made much smaller than those on a normal bicycle to further reduce the wheel’s angular momentum. Regardless of the challenges, an acceptable TMS bicycle was created and tested, with startling results.At speeds above 2.3 m/s, the modified bicycle was self-stable. Once the speed dropped below 2 m/s, the bicycle would begin to fall and not self-correct, however at speeds above 2.3 m/s, a rather strong lateral force could be applied to the bicycle, causing a lateral lean and a correlating turn of the bicycle. The simulations also showed an obvious correlation between lean and yaw (yaw meaning a change in the direction of the steering column). As the simulated bicycle leaned, there was a direct correlation in the direction of the steering column until the column aligned itself with the direction of travel of the bicycle. In the actual experiments, the bicycle would lean and turn, the yaw would align with the direction of travel, but because of the momentum of the steering axis it continued to turn, leaning the bicycle a little bit in the opposite direction, but working its way back. This small oscillation was unexpected, but further proved their point.
With this simulation effectively proving that the caster effect and gyroscopic torque were not the only factors in self-stabilization, the Cornell team built a simple but carefully designed “Two Mass Skate” bicycle, or TMS bicycle. They called it the Two Mass Skate bicycle because a critical design element was the placement of the two masses attached to the bicycle, one attached to the rear frame and one on the steering column. As I will later describe, the placement of these two masses was critical in achieving self-stability. The Skate term comes from their desire to eliminate gyroscopic effects, a skate having no gyroscopic torque. The term is also related to the caster effect, with the ground point of contact ahead of the steering axis, similar to a skate. The design turned out to be much harder than the simulated bicycle, because the simulated bicycle was designed with point masses, but of course an actual bike deals with distributed mass throughout the frame. The wheels were also made much smaller than those on a normal bicycle to further reduce the wheel’s angular momentum. Regardless of the challenges, an acceptable TMS bicycle was created and tested, with startling results.At speeds above 2.3 m/s, the modified bicycle was self-stable. Once the speed dropped below 2 m/s, the bicycle would begin to fall and not self-correct, however at speeds above 2.3 m/s, a rather strong lateral force could be applied to the bicycle, causing a lateral lean and a correlating turn of the bicycle. The simulations also showed an obvious correlation between lean and yaw (yaw meaning a change in the direction of the steering column). As the simulated bicycle leaned, there was a direct correlation in the direction of the steering column until the column aligned itself with the direction of travel of the bicycle. In the actual experiments, the bicycle would lean and turn, the yaw would align with the direction of travel, but because of the momentum of the steering axis it continued to turn, leaning the bicycle a little bit in the opposite direction, but working its way back. This small oscillation was unexpected, but further proved their point. The key to self-stability in this TMS bicycle was the mass distribution. The bulk of the mass of the steering column was placed ahead of the steering axis, and naturally below the mass of the rear frame. As the bicycle began to lean, an interesting pendulum effect caused the steering of the bicycle. In their paper, the Cornell professors compare a pencil with a broomstick. The short pencil placed on end and tipped over will fall at a much faster rate than a tall broomstick placed on end and tipped. The acceleration of a falling inverted pendulum is inversely proportional to the length of the pendulum, so in essence the higher the pendulum the lesser the acceleration. On the bicycle, the pendulum created by the mass of the rear frame is higher than the pendulum created by the mass of the steering column. Naturally, the steering column wants to “fall” faster than the rear frame, thus causing steering in the direction of the fall.The Cornell professors are quick to point out that this discovery does not negate the importance of gyroscopic torque and the caster effect. In fact, their paper states that one of the conditions of a self-stable bicycle is that at least one “coupling” factor must be present – a factor that pairs lean and yaw. Until now, it was thought that gyroscopic torque and the caster effect were the only coupling factors present in a bicycle; however this experiment adds another coupling factor into the mix – mass distribution. The other conclusion they reach in their research is that “to hold a self-stable bicycle in a right steady turn requires a left torque on the handlebars.”The Cornell paper notes that some bicycle designs incorporating both gyroscopic torque and the caster effect are inherently not self-stable. According to them, “[they] have found no simple physical explanation” as to why this TMS bicycle steers the proper amounts at the proper times to assure self-stability, and “[they] also have found no simple necessary conditions for self-stability.” They admit that they can take any stable bicycle and make it unstable by adjusting only the gyroscopic torque, which seemingly proves the necessity of that force and negates this study. But thanks to this experimentation done be this group of Cornell professors, we know that gyroscopic torque and the caster effect are not the only two factors in bicycle self stability. According to the Cornell group, this could lead to more efficient bicycle design. While our current design certainly works, it is also clear that there are “potentially useful regions of design space” currently unexplored.
The key to self-stability in this TMS bicycle was the mass distribution. The bulk of the mass of the steering column was placed ahead of the steering axis, and naturally below the mass of the rear frame. As the bicycle began to lean, an interesting pendulum effect caused the steering of the bicycle. In their paper, the Cornell professors compare a pencil with a broomstick. The short pencil placed on end and tipped over will fall at a much faster rate than a tall broomstick placed on end and tipped. The acceleration of a falling inverted pendulum is inversely proportional to the length of the pendulum, so in essence the higher the pendulum the lesser the acceleration. On the bicycle, the pendulum created by the mass of the rear frame is higher than the pendulum created by the mass of the steering column. Naturally, the steering column wants to “fall” faster than the rear frame, thus causing steering in the direction of the fall.The Cornell professors are quick to point out that this discovery does not negate the importance of gyroscopic torque and the caster effect. In fact, their paper states that one of the conditions of a self-stable bicycle is that at least one “coupling” factor must be present – a factor that pairs lean and yaw. Until now, it was thought that gyroscopic torque and the caster effect were the only coupling factors present in a bicycle; however this experiment adds another coupling factor into the mix – mass distribution. The other conclusion they reach in their research is that “to hold a self-stable bicycle in a right steady turn requires a left torque on the handlebars.”The Cornell paper notes that some bicycle designs incorporating both gyroscopic torque and the caster effect are inherently not self-stable. According to them, “[they] have found no simple physical explanation” as to why this TMS bicycle steers the proper amounts at the proper times to assure self-stability, and “[they] also have found no simple necessary conditions for self-stability.” They admit that they can take any stable bicycle and make it unstable by adjusting only the gyroscopic torque, which seemingly proves the necessity of that force and negates this study. But thanks to this experimentation done be this group of Cornell professors, we know that gyroscopic torque and the caster effect are not the only two factors in bicycle self stability. According to the Cornell group, this could lead to more efficient bicycle design. While our current design certainly works, it is also clear that there are “potentially useful regions of design space” currently unexplored.
Obviously, there is more than meets the eye to bicycle self-stability. Early pioneers such as Klein and Sommerfield made unprecedented progress in the field, and this last round of experimentation just proves that science continues to progress and provide us with answers to what seem to be unanswerable questions, or at least those questions with partial answers. The work of Klein and Sommerfield and Jones was not negated by this experiment, but rather it was strengthened as part of a cohesive whole.
Bibliography
Kooijman, J. D. G., et al. “A bicycle can be self-stable without gyroscopic or caster effects.” Science Magazine (2011): 339-342.
Ruina, Andy. TMS Bicycle. 15 April 2011. 20 April 2011 <http://ruina.tam.cornell.edu/research/topics/bicycle_mechanics/stablebicycle/index.htm>
Steele, Bill. Cornell University Chronicle Online. 14 April 2011. 20 April 2011 <http://www.news.cornell.edu/stories/April11/bicycle.html>.